Gray balance for RGB (driving) printer.
Gray balance for RGB (driving) printer.
RGB 印表機灰平衡。
在CMYK的輸出控制可以依循G7的規範,簡單講,C50M40Y40這一個色塊在輸出時,L*值大約在58,a*,b*值則為紙張a*,b*值的一半。有清楚的目標,就能設計出控制方法。
那些沒有經過RIP,無法單獨控制CMYK頻道的RGB印表機要怎麼控制灰平衡呢?
我的架構裏,G7 灰平衡的概念可以沿用,但色彩檢測的結構要重新建立。
在CMYK測試環境中,C50MY40 的目標值是L*=58,a*,b*值則為紙張a*,b*值的一半。在RGB 結構中,照說50%版調、中性灰的訊號應該是落在R127,G127,B127處,但在sRGB 以RGB=127解釋出來的Lab值是54,0,0。為了維持測試色塊能與CMYK環境中的L值相同(58),我把RGB灰平衡的測試色塊放在RGB=139。
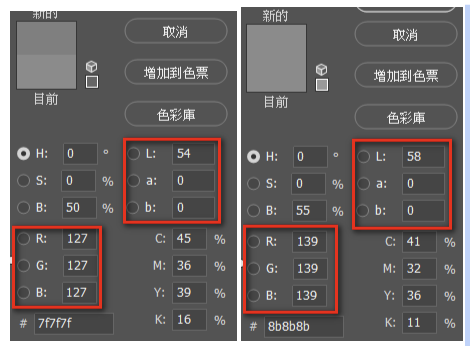
Fig.為了維持測試色塊能與CMYK環境中的L值相同(58),我把RGB環境灰平衡的測試色塊放在RGB=139。
於是,我的RGB印表機灰平衡作業規則為:
測試色塊:R=139,G=139,B=139。
L*目標值=58。
a*,b* 目標值=紙張 a*x0.46、b*x0.46。
在CMYK操作,一般需要Curve 軟體來幫忙找CMY灰平衡落點,我自己也發展過幾個階段的灰平衡邏輯,目前用最多的是我所謂的第二階段灰平衡邏輯,預測值也許沒有Curve4好,但也足夠拿到G7 Targeted 規格。
RGB 呢?沒有Curve 軟體可以用,我試著把我的第三個灰平衡邏輯用在這個項目。
敘述一下我的灰平衡操作邏輯:
1.測量紙張,取得灰平衡目標值,L 定在58,a*,b*=紙張 a*x0.46、b*x0.46。
2. 以sRGB.icm為計算參考,可以取得當L*=58,a* = 紙張 a*x0.46、b*=紙張b*x0.46時,其在 sRGB 空間中的 RGB值, as R1,G1,B1。
3. 測量RGB139印出來的Lab值,這組Lab值可以計算出其在 sRGB 空間的 RGB 值,as R2,G2,B2。
4. 比對R1,G1,B1與R2,G2,B2的差距,即可知道原圖應該在RGB139處做怎樣的RGB 修正量,可以輸出好的灰平衡。
邏輯架構看來可行,實際操作下來也有一定的效果。觀察數十組數據下來,看來可以介入一些系統性的係數修飾。最後的結果如下。
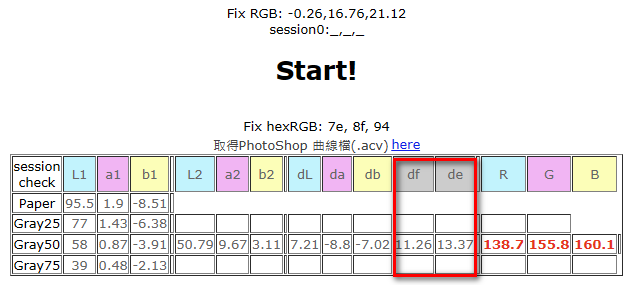
Fig. 紙張樣本1,紙白為95.5,1.9,-8.51,灰平衡目標值為58,0.87,-3.91。實際測得RGB139色彩值為50.79,9.67,3.11。L 值差(dL)7.21,灰差(df)11.26,色差(de)13.37。計算出修正量為R139->138.7、G139->155.8、B139->160.1。
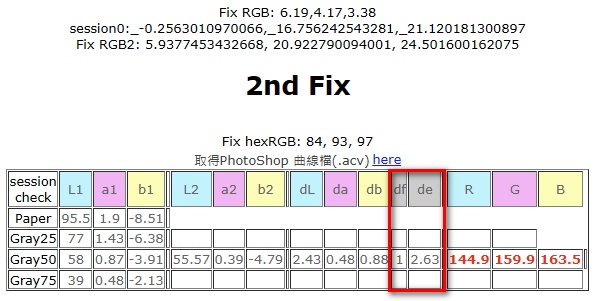
Fig. 紙張樣本1。修正後灰色塊色彩值為55.57,0.39,-4.79。L 值差(dL)2.43,灰差(df)1,色差(de)2.63。從數據面上看已經有很大的改善。
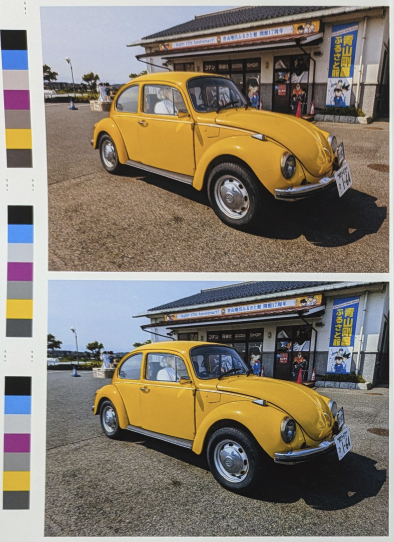
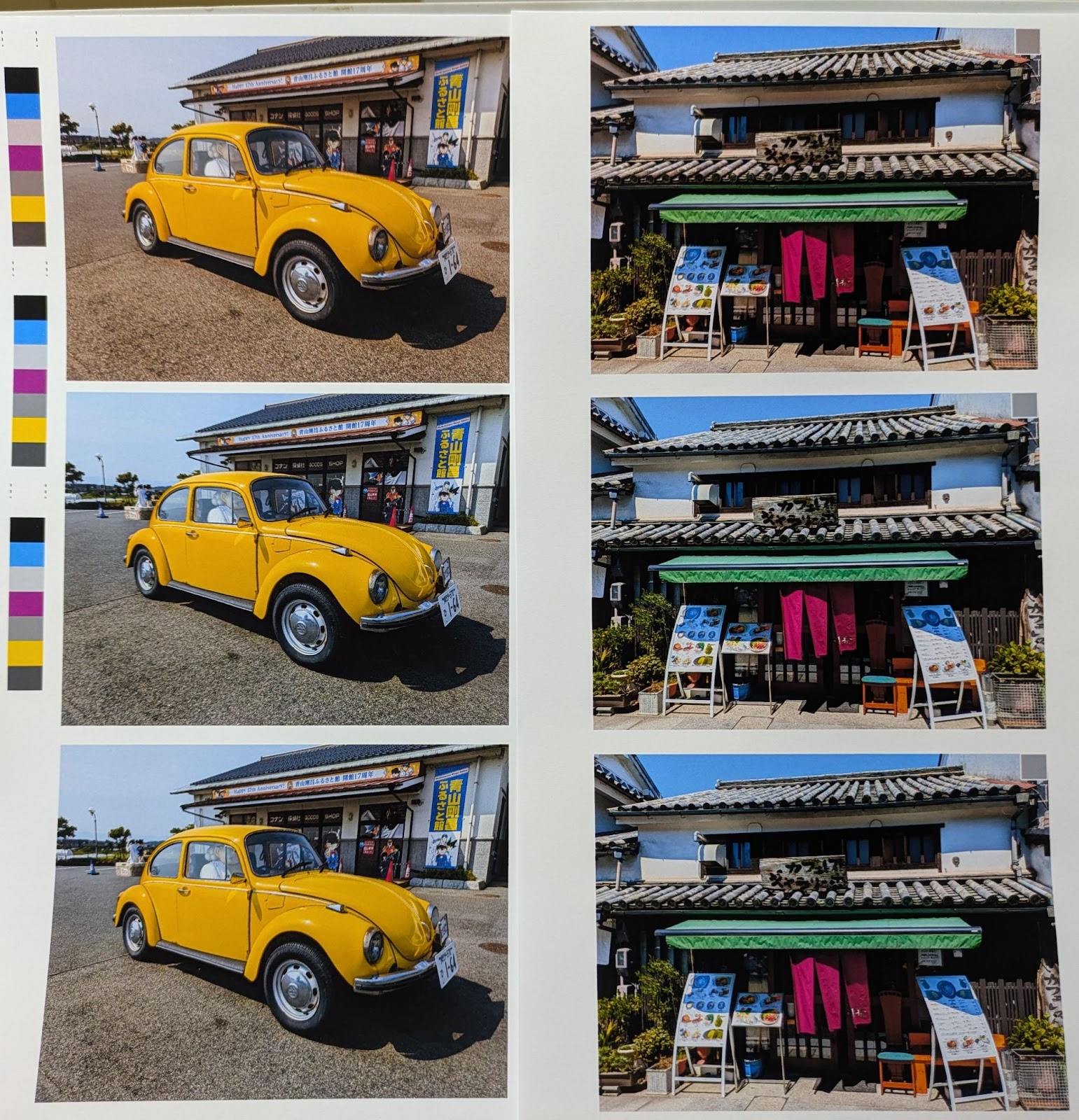
Fig. 視覺上檢視,修正前輸出偏紅,修正後灰平衡得到明顯的改善。
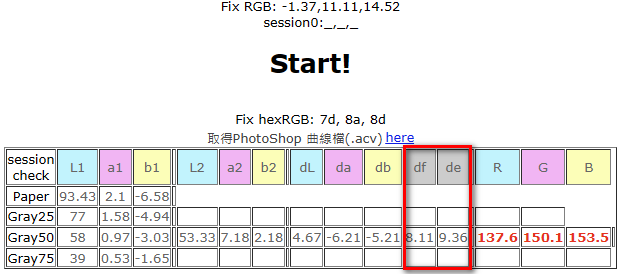
Fig. 紙張樣本2,紙白為93.43,2.1,-6.58,灰平衡目標值為58,0.97,-3.03。實際測得RGB139色彩值為53.33,7.18,2.18。L 值差(dL)4.67,灰差(df)8.11,色差(de)9.36。計算出修正量為R139->137.6、G139->150.1、B139->153.5。
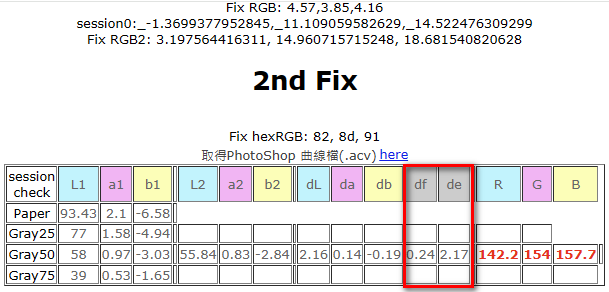
Fig. 紙張樣本2。修正後灰色塊色彩值為55.84,0.83,-2.84。L 值差(dL)2.16,灰差(df)0.24,色差(de)2.17。從數據面上看有很大的改善。

Fig. 視覺上檢視,修正前輸出同樣偏紅,修正後灰平衡得到明顯的改善。
最後來比較一下與icc程序的差別,若以icc方式輸出,數據如下:
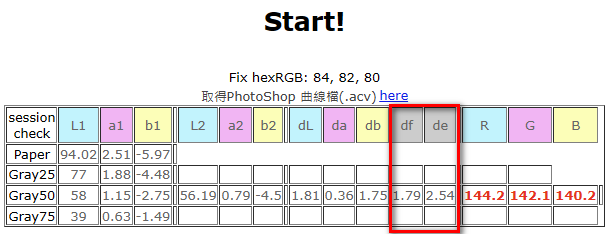
Fig. 以icc方式輸出。灰色塊色彩值為56.19,0.79,-4.5。L 值差(dL)1.75,灰差(df)1.79,色差(de)2.54。就數字面來講,跟灰平衡程序達成的數值差不多。
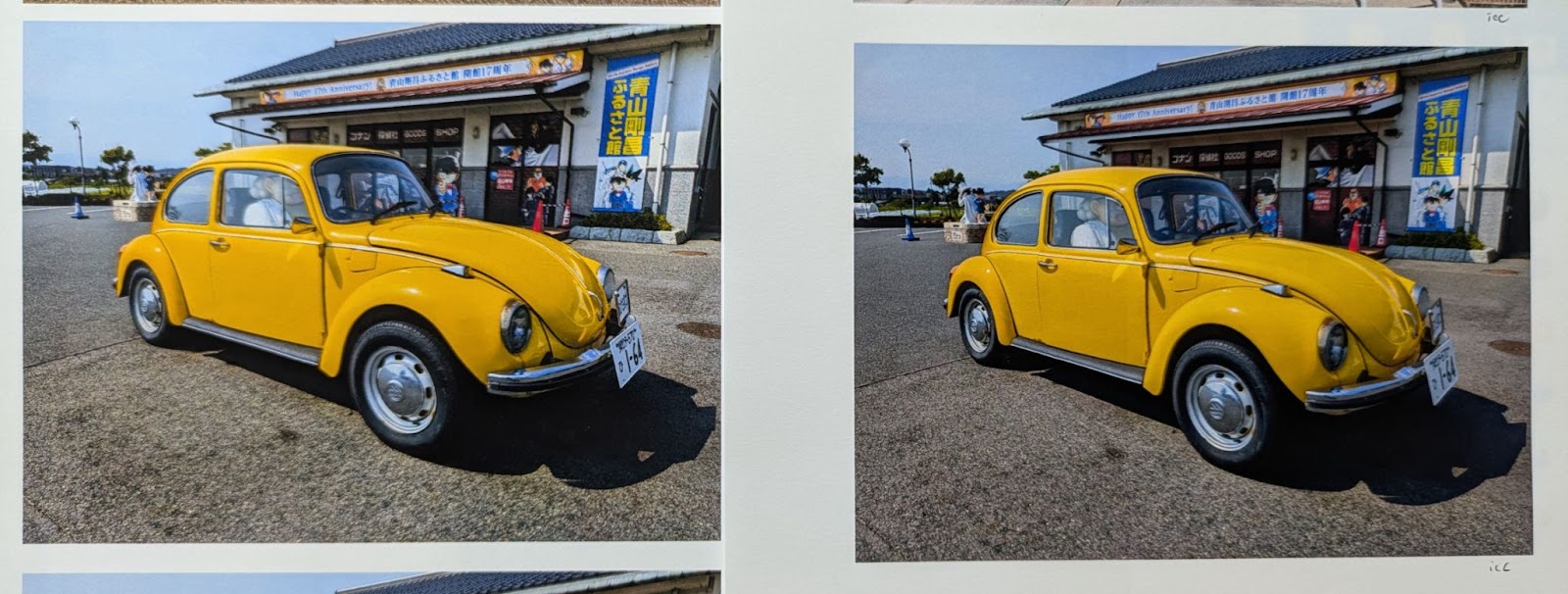
Fig. 左邊爲灰平衡修正程序,右邊為icc程序,大面積的停車場地面還是看得出一點差別,在這一張,灰平衡程序的金龜車黃色要更飽和些。

Fig. 左邊爲灰平衡修正程序,右邊為icc程序,兩邊看起來差不多,icc程序的藍天更飽和些。
大致上來看icc程序與灰平衡程序呈現出差不多的效果,不過大家要知道icc程序必需過大量的數據測量及足夠的軟體資源才能達成。相較於灰平衡單點修正,灰平衡程序只要測一個點,就帶出差不多的效果,是一個相對很有效率的工作方法。
要仔細去比,icc 還是能帶來更全面的色彩準度,但icc也有它的缺點,在色域空間轉換時,最亮、最暗的地方以及最飽和的地方有時候會被壓縮到;用RGB Printer driver 直接驅動,有可能會有更好的dynamic range 及更飽和的顏色,這時候只要把灰平衡抓對,輸出品質不會有太大問題,有可能還會更飽和,更 pleasing。
尚無留言
 Comments RSS
Comments RSS
 TrackBack Identifier URI
TrackBack Identifier URI
No comments. Be the first.
 Leave a comment
Leave a comment
